ENG
ENGКомпьютерная диагностика АКП на автомобиле (часть 5)
Автомобильный технический эксперт
Рассмотрим исполнительные элементы, относящиеся к исполнительному интерфейсу. Как уже указывалось ранее, все они управляются специально созданными электронным блоком управляющими сигналами. При этом подвижные части исполнительных элементов пропорционально полученным сигналам приходят в движение, которое преобразуется в какую-либо управляющую физическую величину.
К основным исполнительным элементам относятся электродвигатели постоянного тока и электромагнитные клапаны (соленоиды).
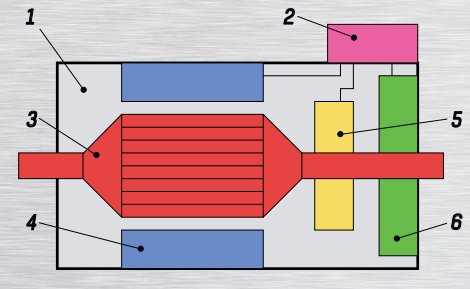
Электродвигатель – это электрическая машина, с помощью которой электрическая энергия преобразуется в механическую для приведения в движение различных механизмов (илл. 1). Электродвигатели постоянного тока бывают:
- Коллекторные – в этих двигателях переменное магнитное поле, обеспечивающее вращение вала, образуется обмотками ротора, которые запитываются напряжением через щеточный коммутатор – коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор.
- Вентильные – в них переменное магнитное поле, обеспечивающее вращение вала, образуется обмотками статора, которые запитываются напряжением через полупроводниковый коммутатор, управляемый датчиками положения ротора. Коллектор у этого двигателя отсутствует.
- Шаговые – в этих двигателях дискретное магнитное поле, обеспечивающее поворот вала, образуется обмотками статора, которые запитываются импульсами напряжения с помощью электронного коммутатора. Коллектор и управляемые датчики у этого двигателя отсутствуют. Шаговый двигатель позволяет осуществлять позиционирование ротора с точностью до долей градуса, что абсолютно недостижимо для других типов двигателей. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Имеются шаговые двигатели и с линейным перемещением ротора. Кроме того, ротор такого двигателя можно жестко зафиксировать в нужном положении без применения электромагнитных, механических тормозных или удерживающих систем.
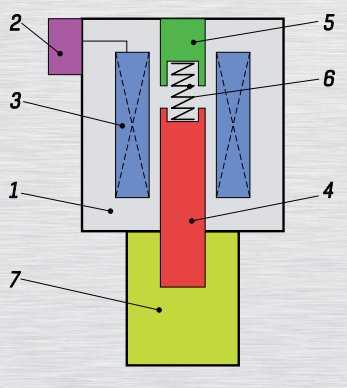
Электромагнитный клапан (соленоид) – в этих клапанах магнитное поле, обеспечивающее линейное перемещение сердечника, образуется цилиндрической обмоткой, которая запитывается напряжением через полупроводниковый коммутатор. Обмотка соленоида представляет собой катушку индуктивности, длина которой превышает ее диаметр (илл. 2). Сердечник электромагнитного клапана механически связан с исполнительной частью: золотником, штоком и т. п. При этом обычно сам электромагнитный клапан и его исполнительная часть конструктивно выполняются в едином корпусе. Электромагнитные клапаны бывают:
- Переключающие – которые имеют два положения сердечника «включено»/«выключено»;
- Регулирующие – которые имеют возможность плавно перемещать сердечник от положения «включено» до «выключено».
Как уже было сказано, все исполнительные элементы управляются специально созданным в электронном блоке напряжением. Некоторые исполнительные элементы управляются только подачей на определенные контакты и в определенное время импульсного напряжения – это шаговые электродвигатели. Остальные исполнительные элементы управляются подачей напряжения или его отсутствием. Самым простым методом управления является постоянное наличие или отсутствие питающего напряжения. Таким методом управляются переключающие электромагнитные клапаны, коллекторные и вентильные двигатели, не требующие регулирования частоты вращения вала. В остальных случаях для изменения питающего напряжения производится его модуляция. Модуляцией называется процесс изменения одного или нескольких параметров высокочастотного несущего колебания по закону низкочастотного информационного сигнала. Из всех видов модуляций для управления исполнительными элементами наиболее подходит импульсная модуляция, где носителем сигнала являются импульсы, следующие с определенной постоянной частотой (илл. 3). Чаще всего из всех видов импульсной модуляции для управления исполнительными элементами применяется широтно-импульсная модуляция (ШИМ). Частота сигнала ШИМ выбирается из расчета того, чтобы управляемый элемент в силу своей электрической и механической инерционности не успевал отрабатывать каждый импульс управляющего сигнала. Диапазон этой несущей частоты применительно к управлению элементами АКП обычно лежит в пределах от 50 до 500 Гц, хотя автор встречался с управляющими сигналами, имеющими частоту и 1200Гц. При таком сигнале управляемый элемент реагирует только на среднее значение тока, которое равно соотношению времени включенного состояния элемента ко времени его выключенного состояния (илл. 4). Это соотношение называется скважностью сигнала, коэффициентом заполнения и т. п. (обычно измеряется/указывается в %). Управление ШИМ-сигналом может осуществляться как по «массе» (минусовое управление), так и по «плюсу» (положительное управление). Этим сигналом управляются регулирующие электромагнитные клапаны, коллекторные и вентильные двигатели, требующие регулирования частоты вращения вала.
Таким образом, были рассмотрены все типы исполнительных элементов, применяемых в исполнительном интерфейсе модуля управления современной АКП. Для оценки качества и правильности сигнала на исполнительные элементы используют цифровые осциллографы. Производители в технической документации все чаще начинают предоставлять информацию о форме сигнала на исполнительный элемент при определенных режимах работы АКП. Это позволяет при диагностике выявить некорректность сигнала, а вот причину некорректности должен определить специалист. Самый простой способ проверки функционирования любого исполнительного элемента является метод его замены на новый. Однако, если после замены сигнал все равно не будет корректным, причиной этого может являться как электрическая проводка исполнительного элемента, соединяющая его с модулем, так и проводка внутри модуля до управляющего устройства (драйвера) исполнительного элемента. И последнее, что может быть неисправно, это сам управляющий модуль как результат физического или программного повреждения. В последнем случае устранить неисправность поможет перепрограммирование модуля управления АКП.
Схемы
Принципиальная конструкция электродвигателя постоянного тока
- Корпус электродвигателя
- Клемма электрического подключения электродвигателя
- Ротор электродвигателя с валом, в зависимости от конструкции, выполняется как с обмоткой, так и с постоянными магнитами
- Статор электродвигателя, в зависимости от конструкции, выполняется как с обмоткой, так и с постоянными магнитами
- Коллектор, в зависимости от конструкции, может применяться или отсутствовать
- Коммутатор, в зависимости от конструкции, применяется или отсутствует.
Принципиальная конструкция электромагнитного клапана (соленоида)
- Корпус соленоида
- Клемма электрического подключения электромагнитного клапана
- Катушка соленоида
- Сердечник соленоида
- Неподвижная опора сердечника
- Пружина сердечника
- Исполнительная часть электромагнитного клапана
Виды импульсной модуляции
- Несущий сигнал
- Моделирующий сигнал
- Амплитудно-импульсная модуляция (АИМ) – это изменение амплитуды импульсов без изменения их длительности и частоты следования.
- Широтно-импульсная модуляция (ШИМ) – это изменение длительности импульсов без изменения их амплитуды и частоты следования.
- Частотно-импульсная модуляция (ЧИМ) – это изменение частоты следования импульсов без изменения их длительности и амплитуды.
- Фазоимпульсная модуляция (ФИМ) – это изменение времени подачи импульса без изменения его длительности и амплитуды, при этом частота определяется только длительностью импульса.
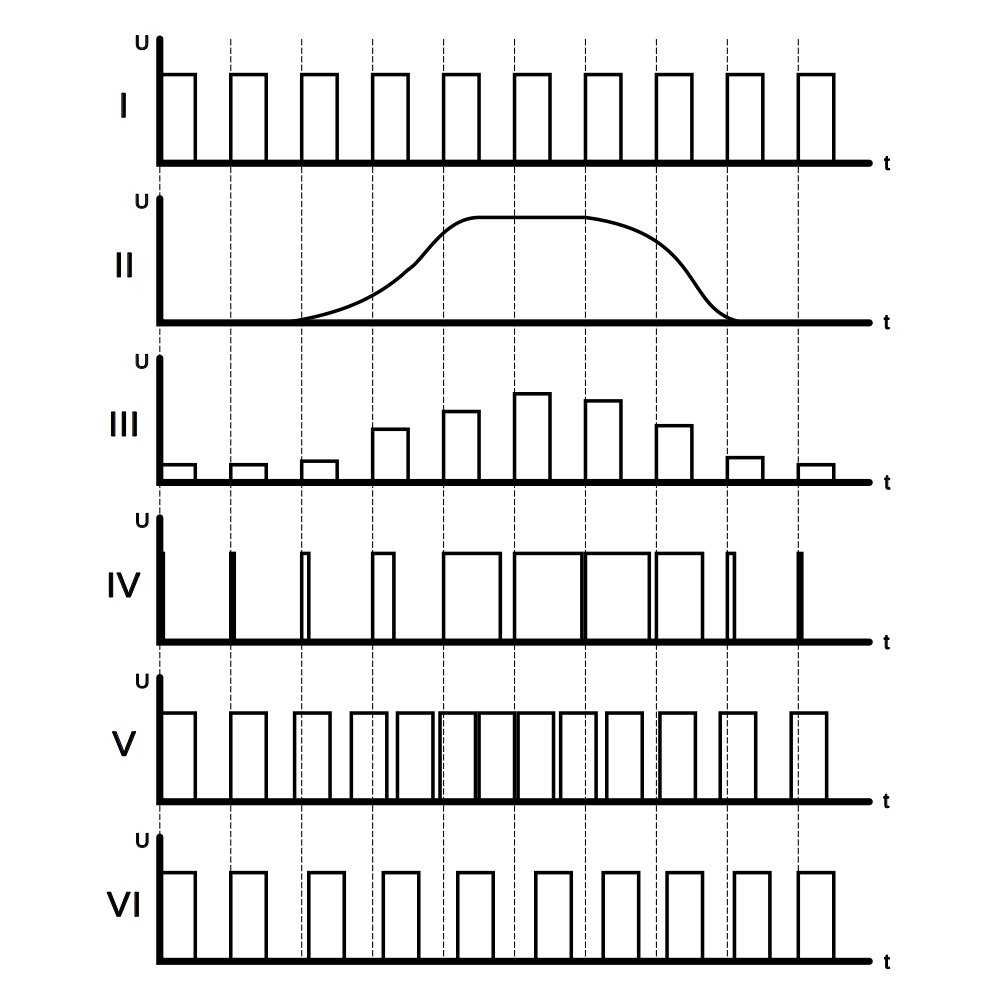
Дополнительно необходимо указать, что существует другие импульсные модуляции (кодоимпульсная, разнодискретная и т. п.), но они, как и амплитудно-импульсная и фазоимпульсная, не применяются в управлении исполнительными элементами АКП. Автор встречался с использованием частотно-импульсной модуляции при управлении исполнительными элементами АКП.
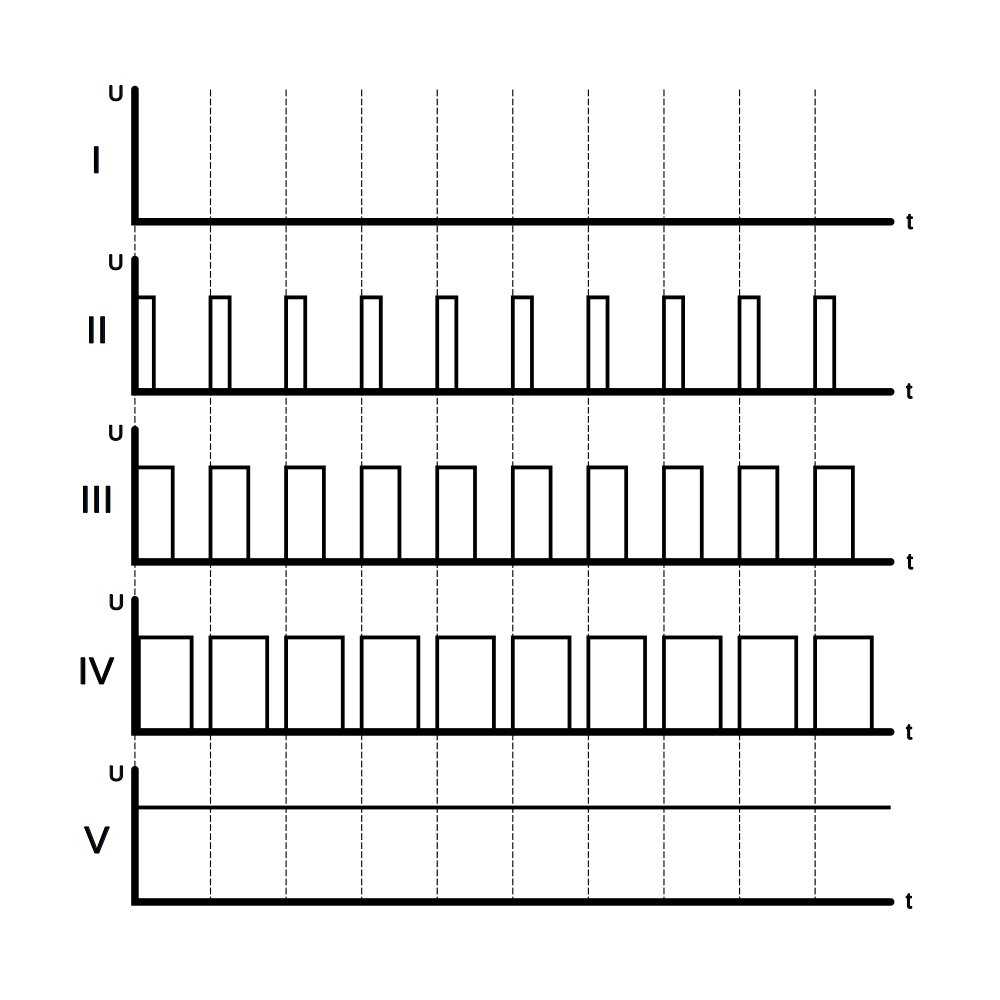
Изменение сигнала ШИМ от минимального значения
(выключен – нет подачи напряжения) до максимального (включен – подано полное напряжение)
- I Коэффициент заполнения (скважность) – 0%. Подачи напряжения нет. Исполнительный элемент выключен
- II Коэффициент заполнения (скважность) – 25%. Есть подача частичного напряжения
- III Коэффициент заполнения (скважность) – 50%. Есть подача частичного напряжения
- IV Коэффициент заполнения (скважность) – 75%. Есть подача частичного напряжения
- V Коэффициент заполнения (скважность) – 100%. Есть полная подача напряжения. Исполнительный элемент включен